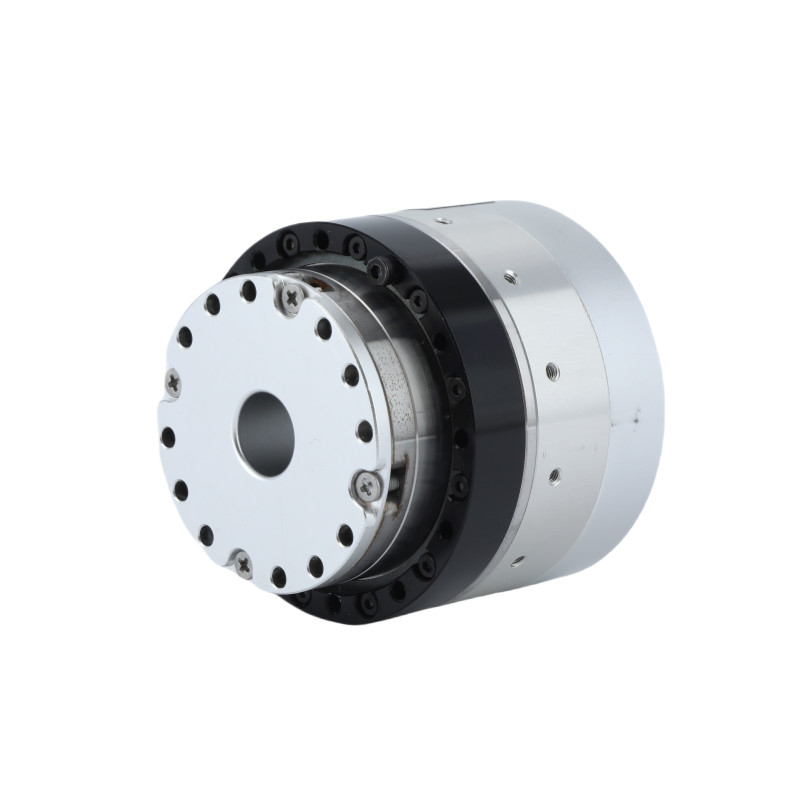
Motor sendi robot HPJM-RE50-60-PRO-XX
P/N Interpretasi

Deskripsi produk
Motor sendi robot adalah komponen penting yang mendorong gerakan lengan robot atau sistem serupa.seperti presisi, torsi, kecepatan, dan keandalan.
Karena aktuator putar Anda sudah mengintegrasikan motor, gearbox, dan encoder untuk presisi tinggi, ia sangat cocok untuk aplikasi sendi robot.
Sendi robot, yang kadang-kadang dikenal sebagai poros, adalah bagian-bagian bergerak dari robot yang menyebabkan gerakan relatif antara tautan yang berdekatan.Tautan ini mengacu pada komponen kaku yang menghubungkan sendi untuk memastikan operasi yang tepat dan mudah.
Fitur
1. Kinerja yang sangat baik
Motor torsi, dengan kapasitas kelebihan beban yang tinggi, untuk operasi yang stabil, dan kontrol kekuatan yang lebih akurat dan aman.
Enkoder multi-lingkaran presisi tinggi dengan nilai absolut ganda dikonfigurasi untuk memastikan akurasi output yang tinggi dan akurasi penentuan posisi berulang 0,001°.
Multi putaran ganda nilai mutlak encoder + torsi motor + kekakuan tinggi harmonik reduksi membuat kontrol kekuatan virtual menjadi kenyataan.
Desain poros berongga besar, untuk memenuhi kebutuhan kabel pusat, sementara membuat struktur sendi lebih kompak.
2. Berat ringan
Efisiensi tinggi: algoritma kontrol vektor berdasarkan prediksi model memastikan kontrol gerakan frekuensi tinggi sambil mempertahankan dampak panas yang rendah.
3. Hidup panjang
Keakuratan penentuan posisi kurang dari 0,015 ° dan akurasi penentuan posisi berulang dapat mencapai 0,001 °.
4Mudah dipasang.
6 ukuran sendi yang berbeda mudah diintegrasikan ke dalam struktur tubuh robot Kompak 6 elemen inti dari sendi robot diintegrasikan dalam ruang terbatas.
5. Berkelanjutan
Konsumsi daya yang lebih rendah, mendukung banyak pengontrol merek utama.
Gambar Rincian
Lembar spesifikasi
| Rasio Pengurangan |
51 |
81 |
101 |
| Torsi nominal |
N·m |
7.2 |
11.6 |
11.6 |
| Torsi maksimum pada start dan stop |
N·m |
20 |
25 |
30 |
| Torsi puncak |
N·m |
37 |
51 |
60 |
| Tegangan bus DC 48VDC |
Arus nominal (dengan sink panas aluminium) |
A |
3.6 |
| Arus maksimum |
A |
10.8 |
| Kecepatan nominal |
RPM |
68 |
42 |
33 |
| Kecepatan maksimum |
RPM |
90 |
56 |
45 |
| Pengkode absolut |
Jenis Encoder |
Enkoder multi-putaran mutlak berongga |
| Resolusi encoder (rotasi motor 1) |
17 bit |
| Penghitung multi-revisi motor |
216(65.536) |
| Reaksi keras |
Arc sec |
20 |
20 |
15 |
| Dapat disesuaikan dalam 10Arc detik |
| Massa |
Tanpa rem |
kg |
0.37 |
| Panjang |
mm |
58.4 |
| Melalui Lubang |
mm |
12 |
| Massa |
Dengan rem |
kg |
0.55 |
| Panjang |
mm |
78 |
| Melalui Lubang |
mm |
10 |
| Kekuatan maksimum motor terus menerus |
W |
150 |
| Tegangan pasokan |
V |
24-48V |
| Bus komunikasi |
Bisa |
| Isolasi motor |
Kelas ketahanan panas:F (((155°C) |
| Resistensi isolasi: Lebih dari 200M Ω ((DC500V) |
| Isolasi menahan tegangan: AC1500V ((1 menit) |
| Mekanisme perlindungan (tingkat perlindungan) |
Penutup penuh dan pendinginan sendiri (default IP50, IP65, IP67, IP68 khusus yang disesuaikan) |
| Rasio Gir |
Torsi puncak |
Torsi maksimum yang diizinkan pada beban rata-rata (N.m) |
Torsi nominal pada 2000RPM (N.m) |
Kecepatan puncak
(RPM) |
Kecepatan nominal
(Dengan 1/2 Torsi Nominal)
(RPM) |
Tanggapan Kembali Peralatan
(arcsec) |
| 51 |
23 |
8.6 |
6.6 |
97 |
75 |
20 |
| 81 |
29 |
13.5 |
9.6 |
61 |
46 |
20 |
| 101 |
34 |
13.5 |
9.6 |
49 |
37 |
10 |
| |
Kekuatan nominal
(W) |
Tegangan Pasokan
(V) |
Maks arus kontinyu
(A) |
Listrik nominal
(A) |
Resistensi
(Ω) |
Resolusi Encoder
(Sedikit) |
Bus Komunikasi |
| 150 |
24-48 |
5 |
3.6 |
0.47 |
17 |
Bisa |
| |
Torsi konstan
(Nm/A) |
Induktansi
(mH) |
Jumlah pasangan Pole |
Poros berongga
(mm) |
Panjang
(mm) |
Massa
(kg) |
Inersia
(g*cm2) |
| 0.089 |
0.215 |
10 |
10 |
82 ± 0.5 |
0.59 |
146 |
Aplikasi
|
|
|
| Robot dan Drone |
Lengan Robot Kolaboratif |
Garis Produksi Otomatis |
|
|
|
| Mesin CNC |
Perangkat Medis |
AGV Logistics |

 Pesan Anda harus antara 20-3.000 karakter!
Pesan Anda harus antara 20-3.000 karakter!